This chapter outlines the hardware components used to build this second generation feral robot prototype. Initially, several alternative hardware platforms were considered to host the client software, as documented in an earlier report where more details on the rationale are available.
The gumstix platform -- which includes a customized GNU/Linux distribution with out-of-the-box support for its hardware features -- was selected as the cornerstone to assemble this prototype. A summary of the hardware setup follows:
- Linux-based system: gumstix connex 400xm-bt single-board computer with stackable add-on boards for extended I/O capability, running the main feral robot client application.
- Environmental sensors: Figaro AM-4-4161 (carbon dioxide gas concentration evaluation module) and Figaro AMS-2100 (air quality sensor), attached to ADC pins on the robostix add-on board.
- GPS receiver: external bluetooth device, wirelessly linked to main gumstix system.
- Wireless TCP/IP networking: Netgear MA701 wi-fi CF card, connected on gumstix netCF add-on board.
- System integration: The above components are supported by a custom-built electronic circuit board and a battery power supply; finally, the package is mounted independently on top of an all-terrain R/C vehicle.
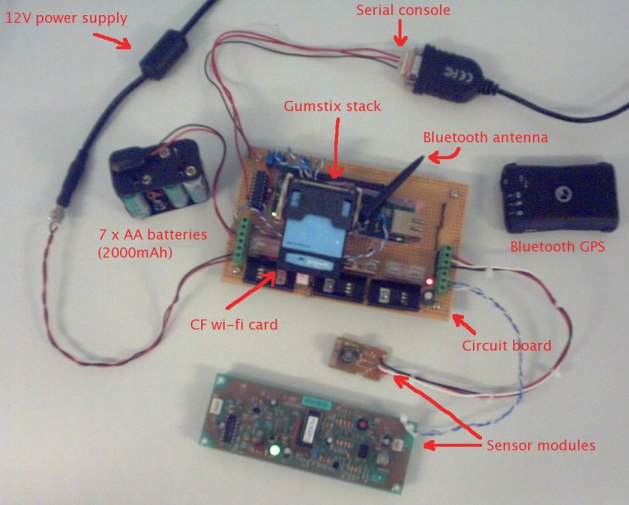
Overview of all relevant hardware components used in this prototype, prior to packaging and mounting.
The following sections provide further detail on the main hardware components, focussing mainly on the actual prototype developed. Most of design decisions were constrained not only by time and budget, but also by reasons of practicality and ease of implementation of this proof of concept. Naturally, many aspects can and must be adjusted or changed altogether to meet the requirements of a specific target application -- some of these possibilities are pointed out throughout the text.
