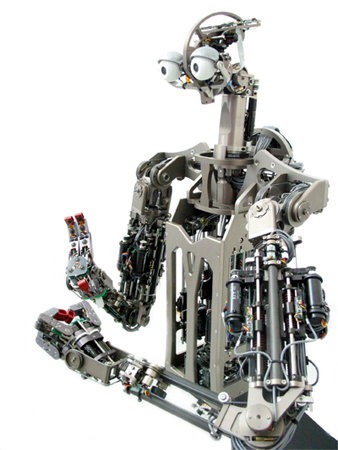
The Domo robot is a new force sensing and compliant humanoid robot under development in the Humanoid Robotics Group at MIT CSAIL. Created by Aaron Edsinger-Gonzales at MIT, it is designed to explore issues in general dexterous manipulation, visual perception, and learning. In particular, Domo is designed to reseach ways that robots can can interact with people and objects in unstructured environments over long periods of time.
(Edsinger Domo Robot )
Domo has the following specifications:
- 29 active degrees of freedom (DOF)
- Two 6 DOF force controlled arms using Series Elastic Actuators (SEA)
- Two 6 DOF force controlled hands using SEAs
- A 2 DOF force controlled neck using SEAs
- Stereo pair of Point Grey Firewire CCD cameras
- Two 4 DOF hands using Force Sensing Compliant (FSC) actuators
- Cognitive processing by a 6 node [and growing] Debian Linux cluster running a mixture of C/C++/Python and utilizing the Yarp robot libraries.
- Weight: 42lbs. Height: 34" tall. Arm span: 5' 6"
The intent of the research is to advance a "creature based approach to humanoid robotics." The idea is that a creature-based robot can be left on for many days in unstructured environments, even interacting directly with people. New behaviors can be added and integrated with existing ones while the experiment is ongoing. To accomplish this, a robotic platform must be scalable and robust - unlike some systems that are designed only to perform specific motions.
The sensorimotor and cognitive architecture for the robot provides a scalable, realtime system with safety features at multiple levels. A creature based approach allows the robot to gain rich, prolonged sensorimotor experiences of its world during manipulation tasks. These experiences are generated from a set of core-compete
